Your shopping cart is empty!
Arduino Robotic IR Infrared Obstacle Avoidance Sensor

Arduino Robotic IR Infrared Obstacle Avoidance Sensor
Product Code: Avoidance Sensor
Availability: 2 - 3 Days
Stock Ready: Kuala Lumpur
Availability: 2 - 3 Days
Stock Ready: Kuala Lumpur
Price:
RM2.99
- OR -

Description :
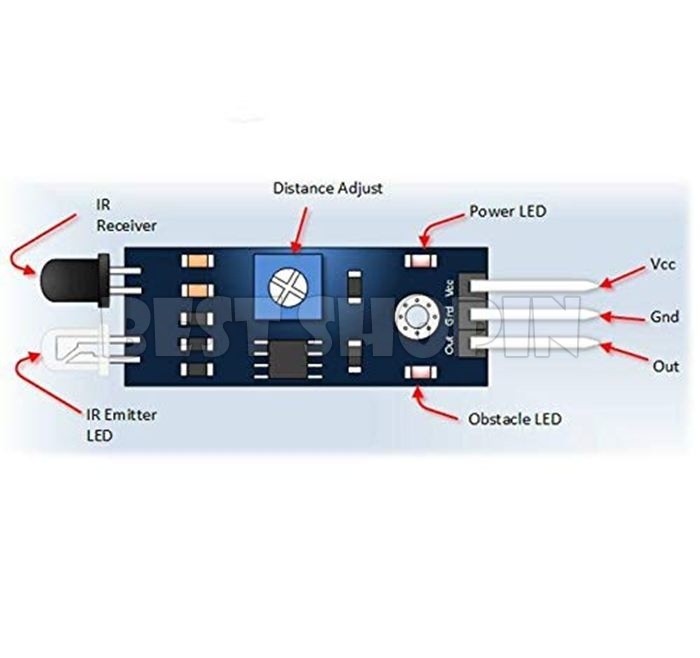
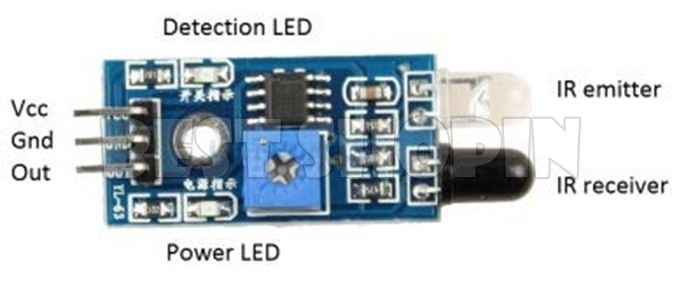
- Infrared IR obstacle avoidance sensor, it’s a module used to detect if something is passing by or an obstacle, like in obstacle avoidance robot, this module is very easy to use, it sends infrared waves and if there’s something they reflect back and inform us that something is near, and it depends of how you set the potentiometer to adjust the detection range.
- The IR obstacle avoidance sensor has an IR transmitter and an IR receiver. This work works like the HC-SR04 Ultrasonic sensor module. The IR transmitter emits IR that is reflected back to the IR receiver when an obstacle with a bright surface comes into contact.The IR light does not reflect on dark surfaces but are rather adsorbed. This characteristics makes it really good for line following robots application.
- When the IR obstacle avoidance sensor is not obstracted, the sensor uses is LOW but as at when it encounters an obstacle and the light is reflected, the sensor goes HIGH. The IR light is invincible to the human eye but visible to a camera. Show your phones camera to the ir sensor and you will see a pinkish ray emiting from the IR transmitter.
Suitable for:
a) By robot car to detect obstacle and then avoid it
b) As a photoelectric switch
c) The electricity meter pulse data sampling
d) Fax machine, shredder paper detection
e) Black and white line detection
Specification :
- Operating voltage: DC 3-5V
- Detection distance: 2 ~ 30cm
- Detection angle: 35 °
- Comparator: LM393
- Board size: 3.2CM *1.4CM(1.22 * 0.59")
- 3mm screw holes for easy mounting
- Adjustable detection distance: 2 to 30 cm. Adjust potentiometer clockwise to increase detection distance.
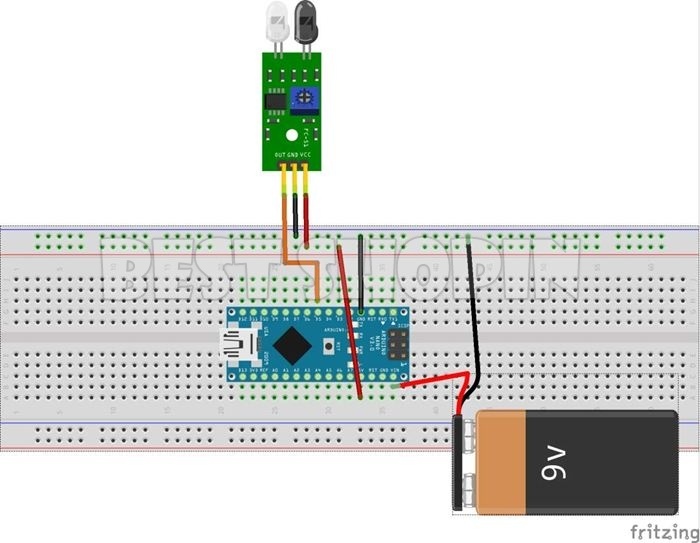
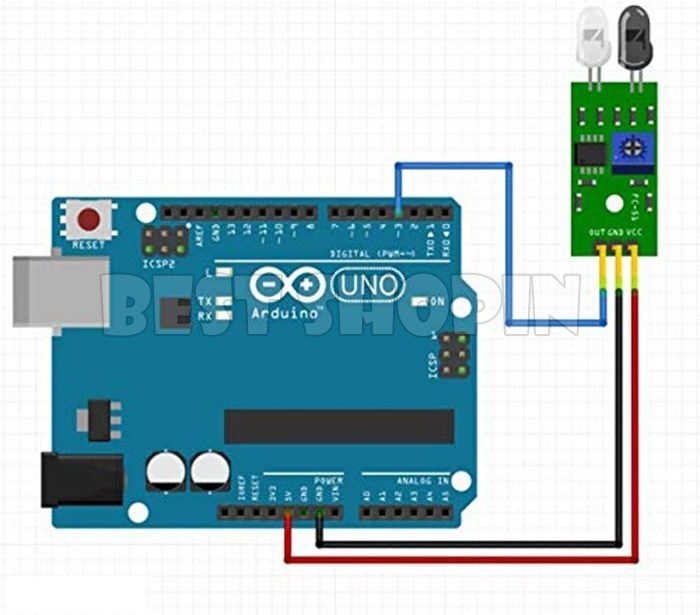
Connection:
VCC : External3.3V-5V voltage (can be connected directly to the 5v and 3.3v MCU MCU) GND - GND External
OUT small board digital output interface (0 and 1)




Write a review
Your Name:
Your Review: Note: HTML is not translated!
Rating: Bad Good
Enter the code in the box below:

